4つの領域でご支援


専用機開発
Special Purpose Machine Development

スクリューコンベア
Screw conveyor
スクリューコンベアは、粉体・粒体・ペースト状材料を定量かつ連続的に搬送できる装置で、原料供給・工程間搬送・装置投入工程に広く使用されています。
当社のスクリューコンベアは、搬送能力・機長・設置レイアウトを工程条件に合わせて個別設計、上位FAシステムやロボットシステムと連携し装置投入工程の自動化を含めた供給量の安定化・省人化を実現しました。

大型フルイ機
Large-scale sorting machine
フルイ機(篩機)は、粉体・粒体原料を粒径ごとに分級し、異物を除去するための装置で、製造工程において、品質の安定化、後工程トラブルの防止、歩留まり向上を目的に使用されます。
当社のフルイ機は、用途に応じたオーダーメイド設計に対応しており、こぶし大を超える粒体原料の実績もあり、また材料特性に配慮したきめ細かなフルイ動作により、迅速な選別と製品損傷の低減を実現しました。

インゴット反転装置
Ingot Reversing Device
インゴット反転装置は、半導体関連工場で使用される装置で、重量かつ大型の金属ケイ素(Si)インゴットを安全に反転させるための専用機です。
従来は、ワイヤーソーによる粗切断のたびに吊り作業を伴う反転作業が必要で、多くの人手と時間を要していましたが、本装置の導入により、インゴットの反転を簡単に実施できるようになり、作業者は搬送作業に専念でき、作業負荷の低減と省力化を実現しました。

ホットドレープ成形機
Hot Drape Forming Machine
ホットドレープ成形機とは、加熱により軟化させたシート状材料を金型に沿ってドレープ成形する装置で、CFRP・GFRPなどの複合材料や熱可塑性樹脂シートの成形に用いられています。
当社ではオーダーメイドで対応しており、プリプレグおよびドライカーボンファブリックシートの熱成形用で、航空機主翼用CFRP骨組み(翼スパー)向けの実績があります。また成形用カバーを大きく開閉できる構造で成形後のワークをクレーンで垂直搬出できる点も特長です。
高機能コンベア開発
High-Function Conveyor Development
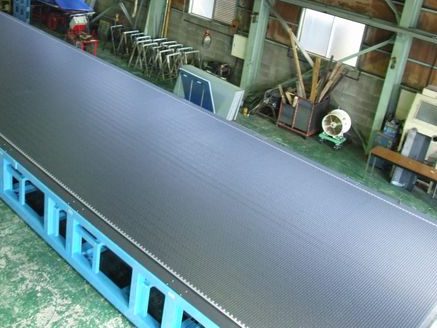
超幅広コンベア
Extra-wide conveyor
当社のオリジナルコンベア「超幅広コンベア」は、自動車工場および航空機産業向けに導入実績を有する、間口4メートル・全長22メートルの大型モジュラーベルトコンベアです。
自動車のフェンダーパネルや航空機外装部品の搬送に使用され、搬送面のガタつきを抑えた安定搬送を実現、また搬送時にはエンコーダによる速度制御を行い、4Kカメラを用いた外観検査装置の一部として使用されています。

多条式チェーンコンベア
Multi-Strand Chain Conveyor
多条式チェーンコンベアは、2列以上のチェーンを並列に配置し、搬送物を直接載せて移動させる搬送装置で荷重を分散できる構造のため、パレットなどの重量物搬送に適しており、複数点で支持することで形状が不安定なワークも安定して搬送ができます。
またチェーン間に空間を設けられるため、下方から昇降機や治具を干渉なく配置できる点も特長で当社のロボット技術と組み合わせることで、各チェーンの差動動作を活用した複合的な整列搬送を実現しました。

シャトル搬送装置
Shuttle Transfer System
シャトル搬送装置とは、生産ラインの特定区間を往復(シャトル)動作しながらワークを搬送する装置であり、自動車製造業界では、ワークを高速で高精度に位置決めしながら搬送する用途で使用されています。
当社のシャトル搬送装置は、22kWサーボモーターおよび高剛性フレーム構造を採用することで可搬力のある高速動作に対応し、産業用ロボットと組み合わせることで、ロボットの高速移動を実現する走行装置として実現しました。

自動レベリング受台
Shuttle Transfer System
自動レベリング受台とは、自動車製造業界向けに当社が独自開発したオリジナル装置で、固定式の検査用カメラを用いた外観検査装置の一部としてボンネットやフェンダーなど湾曲形状を有するパネルを任意の角度に傾斜させて外観検査を行う目的で開発されました。
その後、用途を拡張し産業用ロボットが湾曲の大きいパネルを把持する際に、最適な高さや傾きを自動で調整、また上位システムと連携できる受け台として進化しています。
FAシステム開発
FA System Development

暗室内レーザー溶接
本システムは、産業用ロボットにレーザー溶接機を搭載し、完全遮光された暗室内でレーザー溶接を行うFAソリューションです。
外乱光を遮断した暗室環境で光学センシングを行うことにより、部材間の極めて狭い隙間を高精度に検出します。この検知情報を基に溶接経路をリアルタイム補正することで、微細な接合部に対しても正確な入熱を実現しました。品質の安定化と作業者の安全性確保を両立し、精密な溶接が求められる生産ラインの自動化が可能となりました。

継ぎ手バリ取り
バ本システムは、重機用オイルシリンダ継手の製造ラインにおいて、内部バリ取り工程を自動化するFAソリューションです。
産業用ロボットの多軸制御を活用することで、従来の手作業ではアプローチが困難であった複雑な内部形状への精密加工を実現、個人の技量に依存していた仕上がりのバラツキを排除し、高度な加工品質の安定化しました。また24時間連続稼働による大幅な省人化を可能にし人手不足の解消と生産効率の最大化を同時に達成。

大型ロボットハンド
弊社は、産業機械開発の経験を活かし、ワークや工程に特化した「機械装置としてのロボットハンド」を開発可能です。
FAシステムの成否を握るハンドの重要性を熟知しており、既製品では対応困難な特殊形状や高度な要求に対し、ハンドからの設計や製作で最適解を提供します。個別のカスタム開発に柔軟に応じることで、システム全体のパフォーマンスを最大化。エンドエフェクタの革新により、他社には真似できないマテリアルハンドロングが可能となります。

カップ茶碗蒸しマテハン
本システムは、前工程で洗浄されたカップ茶碗蒸しを次工程へ一気に搬送するFAソリューションです。
最大の特徴は、搬送状況に応じて形状を変化させる「可変式多連ハンド」の採用です。動作時に最適な大きさに変形する機構により、限られたスペースでの効率的な移動を実現しました。手作業で懸念された微細な異物付着を自動化により大幅に低減。お客様のニーズに寄り添い、現場ごとの制約条件に合わせた最適なハンド設計を行うことで、衛生管理と搬送効率の両立を実現しました。
オリジナルロボット開発
Original Robot Development

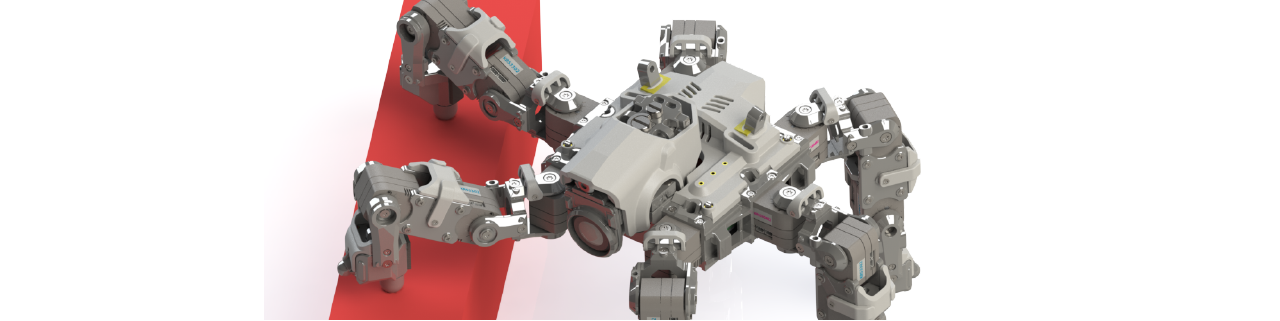
HEXAPOD(6脚ロボット)
ヘキサポッドは、6本の脚部を持つ多脚ロボットです。当社は原子力機構と連携し、「放射線の見える化」を目的とした開発を行い、原子力施設など複雑環境下での空間線量の可視化に取り組んでいます。
3Dプリタを活用した軽量機構設計に加え、LiDARやAIによる自律制御を自社開発し、高度な環境認識と自律走行を統合したロボットソリューションを提供※しています。
※ロボット単体で販売しております。(オプションでSDKあり)
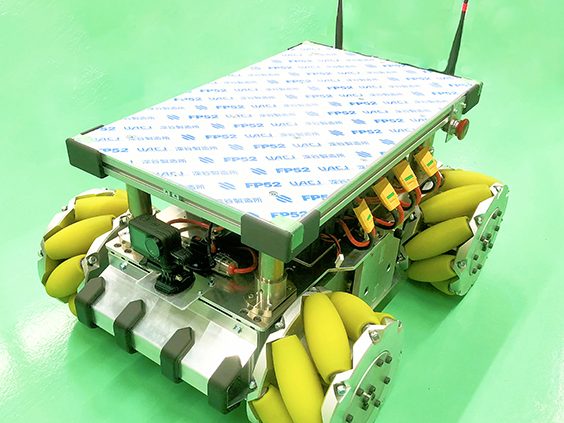
メカナムホイール式ローバー(AMR)
AMR:Autonomous Mobile Robot:自律走行搬送ロボット
本ロボットは、メカナムホイール方式を採用したAMRです。積載重量120kgに対応し、幅450×長630×高320(最大440)mm、自重約40kgの小型設計ながら高い可搬能力を有します。
機構はシンプルで拡張性が高く、研究機関におけるAI・自律走行研究用途で活用されています。制御系にはJetson AGX、Arduinoを採用し、WindowsまたはLinux環境での研究開発に対応しています。
※ロボット単体で販売しております。(オプションでSDKあり)

腕固定アシストスーツ
アシストスーツ「STORNGHOLD※」ストロングホールド
特許:第6671068号
※研究品につき一般販売しておりません。
耳鼻咽喉科や脳神経外科等の手術では、長時間にわたる姿勢維持が医師の大きな身体的負担となっており、当社は医師が任意の姿勢を保持できる手術用アシストスーツを開発。本スーツは動作補助ではなく「姿勢保持」に特化し、上半身を確実に固定する事が特徴です。開発は福井県内企業の専門性を活かした分業体制で行い、県の補助事業として県産部材を活用しています。地域技術を統合し、実用化・製品化を見据えた取り組みを行っています。

農業支援ロボット
農業支援ロボット「TAMBA※」タンバ
※ご購入は共同研究や共同開発のご契約が必要となります。
本システムはアイガモ農法の発想を取り入れた自律走行ロボットです。水田内の除草は重労働かつ高コストで農家の大きな負担となっています。
本ロボットは農業試験所の知見と農家の技術を融合し、4方向カメラと独立自転クローラーを備えたロボットが水田内を走行して水を濁らせることで雑草の成長を抑制します。さらに本ロボット内のWi-Fi機能を使って給水バルブ制御や遠隔監視によって、水田管理のIT化と省力化を実現します。